 Spanish
Spanish 

Comparación de tres módulos transmisores y receptores comunes de 2,4 GHz
NiceRF: una comparación detallada de tres módulos transmisores y receptores comunes de 2,4 GHz y cómo elegirlos.
Jan . 2024
Debido a la mala señal interior, el GPS no se puede utilizar para el posicionamiento en interiores. Sin embargo, la demanda de posicionamiento en interiores es amplia y muchas aplicaciones necesitan localizar la posición de personas u objetos en el espacio interior, especialmente la gestión de almacenes.
El alcance TOF es un algoritmo de posicionamiento por radiofrecuencia (rf), que pertenece a la tecnología de alcance bidireccional, utiliza las señales de datos sobre el tiempo de vuelo entre el transmisor y el receptor para medir la distancia entre dos puntos.
1. Mida el intervalo de tiempo entre que el maestro envía la señal de datos y recibe la señal de respuesta del esclavo, anótelo como Tt.
2. Mida el intervalo de tiempo entre que el esclavo recibe la señal de datos del maestro y envía la señal de respuesta, observe como Tr.
3. El tiempo de vuelo unidireccional de la señal entre el maestro y el esclavo: Tf=(Tt-Tr)/2.la distancia entre los dos puntos: d=c*Tf, c representa la velocidad de propagación de la onda electromagnética.
SX1280 es un chip de búsqueda de alcance de 2,4G basado en modulación LoRa lanzado recientemente por semtech. Además de las funciones de comunicación inalámbrica comúnmente utilizadas, el SX1280 también integra la función de alcance TOF (tiempo de vuelo).
El algoritmo se ha integrado en el chip y los resultados de alcance se pueden obtener con operaciones simples, que pueden ser utilizadas por los usuarios para realizar rápidamente el posicionamiento en interiores.
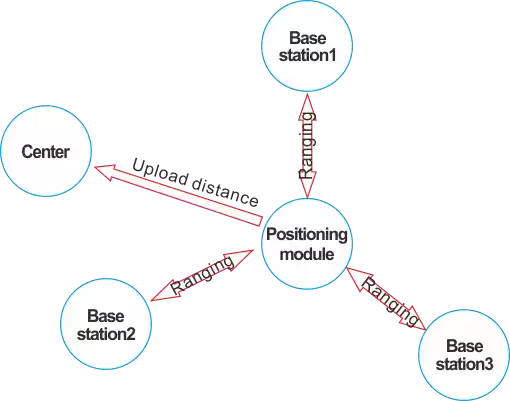
Este algoritmo necesita al menos 5 módulos inalámbricos con chip SX1280, requiere un centro, tres estaciones base y al menos un módulo de posicionamiento.
◆ El centro es responsable de recibir y contar la información de distancia del módulo de posicionamiento y subirla al servidor.
◆ Las tres estaciones base utilizadas como esclavas en el alcance, deben instalarse uniformemente en el almacén para que el módulo de posicionamiento calcule la distancia.
◆ El módulo de posicionamiento se instala en los productos que se van a ubicar, mide en el centro las distancias entre las tres estaciones base por separado (estado de alcance) y carga estas tres distancias en el centro (estado de comunicación).
1. El módulo de posicionamiento está en estado de recepción.
2. El centro envía la instrucción que obtiene información de posicionamiento al módulo de posicionamiento.
3. El módulo de posicionamiento cambia al estado de alcance.
4. El módulo de posicionamiento mide la distancia con la estación base 1 y obtiene la distancia d1.
5. El módulo de posicionamiento mide la distancia con la estación base 2 y obtiene la distancia d2.
6. El módulo de posicionamiento mide la distancia con la estación base 3 y obtiene la distancia d3.
7. El módulo de posicionamiento cambia al estado de comunicación.
8. El módulo de posicionamiento carga d1, d2, d3 al centro.
9. El centro carga d1, d2 y d3 al servidor.
 +86-755-23080616
+86-755-23080616
 ventas@nicerf.com
ventas@nicerf.com
Sitio web: https://www.nicerf.com/
Dirección: 309-314, 3/F, Bldg A, edificio comercial Hongdu, Zona 43, Baoan Dist, Shenzhen, China



política de privacidad
· Política de privacidad
Actualmente no hay contenido disponible
Correo electrónico:sales@nicerf.com
Teléfono:+86-755-23080616